今年央視春晚,堪稱機器人的才藝秀場。它們說學逗唱樣樣精通,臺上能跳舞耍帥,臺下能擼起袖子幹活兒,儼然成了人類的“全能搭子”。
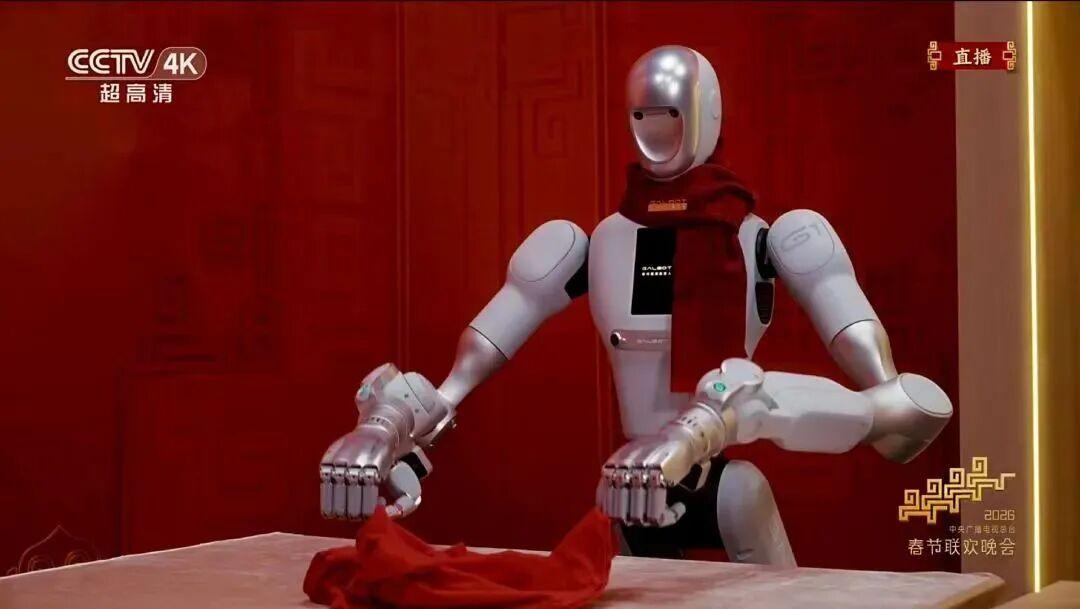
“馬麗單飛了,沈騰怎麼辦?”除夕夜,這一話題衝上熱搜。無數守候在電視機前的觀衆發現,這對國民喜劇搭檔確實換了個賽道——他們出現在總檯春晚的賀歲微電影《我最難忘的今宵》中。而與他們對戲的,除了熟悉的演員,還有這對搭檔的“鐵哥們兒”:來自海淀的銀河通用機器人Galbot。面對兩位即興發揮的大咖,這位“機器人演員”絲毫不怯場,一雙靈活的大長臂行雲流水般展示着各種生活技能,引得網友紛紛調侃:“騰哥在家都不一定有這勤快!”

北京青年報記者瞭解到,與以往按程序跳舞的機器人不同,Galbot是春晚歷史上首個“幹活兒”機器人。盤核桃、撿玻璃碎片、貨架取貨、疊衣服、串烤腸——這五個看似平常的動作,其實對於機器人來說是十分高難度的挑戰。更關鍵的是,每一個動作都不是提前編寫的程序,而是機器人自主決策、實時完成的。
Galbot的表演絕活,藏着怎樣的黑科技?
絕活一:盤核桃,讓指尖擁有“手感”
兩枚核桃在掌心旋轉,難點在於:核桃形狀不規則、重心一直在變,手指力量稍有偏差就會掉落。
銀河通用自主研發的靈巧手神經動力學小腦模型,正是破解這一難題的關鍵。機器人在虛擬世界裏瘋狂練習,系統爲它提供各種大小、重量的虛擬核桃,讓它靠不斷試錯,練出一套適應性極強的“基礎盤法”;然後再讓真實的機器手接觸各種實物,積累真實的“物理手感”。
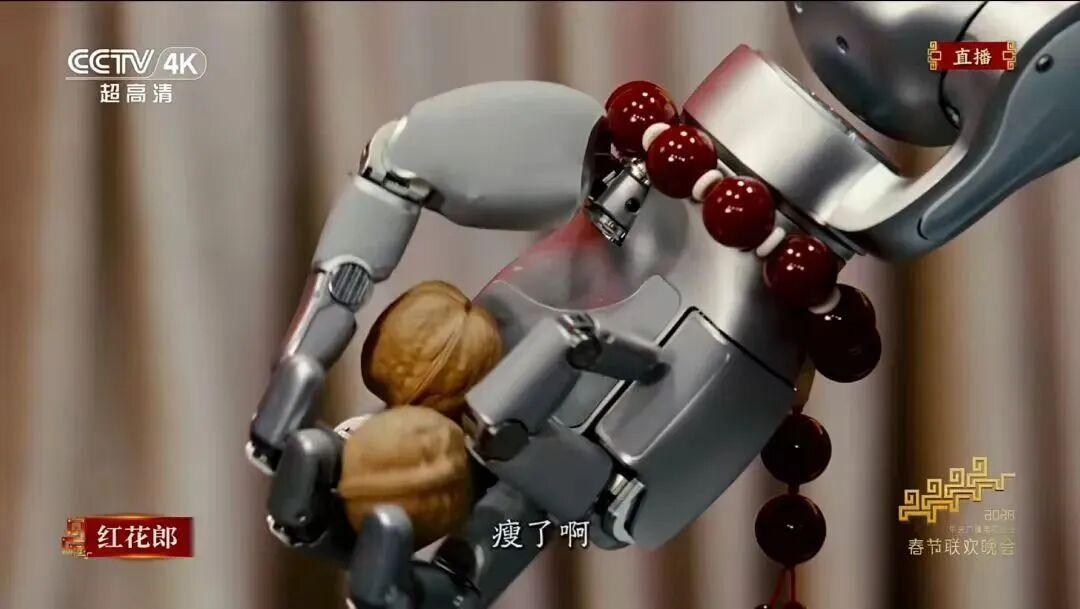
在虛擬世界練招式,在真實世界找手感——兩者結合,機器手就能在現實裏把核桃盤得十分嫺熟。
絕活二:撿玻璃碎片,挑戰感知極限
舞臺上,Galbot需要從淺色桌面上撿起散落的玻璃碎片。玻璃碎片的難點在於:透明物體在視覺上近乎“隱形”,尤其是放在淺色桌面上時,其邊緣、厚度、反光特徵極易與環境融爲一體。
AstraBrain(銀河星腦)的突破在於,通過在仿真環境中生成海量的透明物體數據——不同厚度、不同碎裂形狀、不同光照條件下的玻璃碎片,讓機器人在虛擬世界中“見過”各種可能的透明形態。結合多模態感知融合技術,Galbot能夠從微弱的反光邊緣和陰影變化中“看見”玻璃的存在。
更關鍵的是,力覺反饋讓它在接觸玻璃時能夠感知到硬度和滑動趨勢,以恰到好處的力度穩穩捏起碎片,既不會捏碎,也不會滑落。
絕活三:貨架取貨,動態環境中精準抓取
水瓶被緊密排列在貨架層板之間,周圍商品間距極小,稍有不慎便會碰倒鄰品或抓取失敗。
AstraBrain的強化學習框架讓Galbot在虛擬世界中經歷了億萬次“取貨試錯”:碰到旁邊商品扣分,成功取下加分。經過這樣的自我博弈,它“悟”出了一條最優路徑——先以靈巧的手指輕輕釦住水瓶上半身的瓶蓋處,微微傾斜以避讓兩側鄰品,感知到阻力後順勢調整角度,再穩穩向外抽出。
這不是預設軌跡,而是實時決策的結果。
絕活四:疊衣服,對柔性物體的泛化操作
衣服是柔性的,沒有固定形狀,每一次拿起來的狀態都完全不同。
Galbot面對隨機擺放的T恤,沒有預設的摺疊軌跡,也沒有固定的抓取點。它需要實時判斷布料當前的褶皺狀態,預測摺疊後的形態,並規劃出一系列抓、拉、折、壓的動作序列。
AstraBrain的解決方案是,在仿真環境中生成數以萬計的柔性物體變形數據,讓機器人在虛擬世界中“見過”各種可能的褶皺形態,並學會從當前狀態推演出最優操作路徑。
當Galbot的手指輕輕撫平衣角、精準對摺時,它不是在執行程序,而是在調用海量仿真經驗基礎上的實時決策。
絕活五:串烤腸,雙手協作與工具使用雙重突破
如果說盤核桃考驗的是單手的靈巧,那麼串烤腸則是對雙手協同與工具操作能力的極限挑戰。
Galbot需要一手操控烤鉗進行烤制,另一隻手抓取籤子,雙手協作、精準完成串烤腸的動作,再將烤腸遞給明星——整個動作絲滑流暢。這背後涉及雙手的空間協同、力度的獨立控制,以及對工具這一“身體延伸”的理解。
AstraBrain的端到端大模型架構,讓機器人的“大腦”能夠同時處理雙手的獨立指令流。更重要的是,通過對海量仿真數據的學習,Galbot理解了“工具”的本質:烤鉗不是需要被控制的“物體”,而是手的延伸。
文 | 北京青年報記者 王斌
編輯 | 楊家瑞
監製 | 柳璐