
本文是專業學術論文解讀,不做醫療建議。
電影《神奇旅程》中,幾位醫生縮小到微生物大小,駕駛飛船進入一位科學家大腦,爲其進行血管手術後迅速撤離。
半個世紀以來,這始終是醫學界的一個終極夢想:如果藥物不再是盲目地隨血液流淌,而是像有導航系統的魚羣一樣,精準地遊向病竈,癌症治療將會發生怎樣的質變?
近日,加州理工學院的高偉教授團隊在 Nature Nanotechnology 發表成果,他們開發了一種完全生物可吸收的酶促微泡機器人,這羣機器人能夠以人體代謝廢物尿素作爲動力,在複雜的血管羣中自主“嗅尋”腫瘤的氣息。最令人稱奇的是,當它們抵達腫瘤時,研究人員只需輕輕按下一道超聲波指令,這些機器人便會像微型深水炸彈一樣定向“爆破”,將藥物精準投送進腫瘤內部。
研究結果同樣令人振奮,當團隊爲患病小鼠注射氣泡機器人進行治療時,在 21 天內,其膀胱腫瘤的重量比僅接受常規藥物治療的小鼠減輕了約 60%。
“這個氣泡機器人平臺雖然簡單,卻集成了治療所需的一切要素:生物相容性、可控運動、成像引導,以及能幫助藥物深層滲透的按需觸發機制。我們的目標始終是讓微型機器人走向真正的臨牀應用,而這種機器人設計正是朝該方向邁出的重要一步,”論文第一作者唐鬆鬆表示。他在加州理工學院高偉實驗室擔任博士後期間完成了這項工作,目前已加入中國科學技術大學擔任教授。
變廢爲寶,用尿素驅動
具有自主運動能力的微型和納米機器人已成爲生物醫學領域的變革性工具,它們能夠導航至難以到達的區域,從而實現精準干預,並在複雜的生物環境中發揮更大的作用,例如感測生物標誌物、清除血栓,或將藥物精準遞送至腫瘤病竈。
隨着領域的飛速發展,科研界對機器人設計寄予了更高期待:要求系統不僅要具備強生物相容性,更需兼具智能化、多功能化與高度集成化。
此前,高偉團隊曾利用超聲成像和磁力引導,在動物模型中投放過微型 3D 打印機器人,使其在腫瘤處降解並釋放抗癌藥物。然而,那些機器人需要在配備專門設備的無塵室中製造,其結構是由包裹微氣泡的果凍狀聚合物(水凝膠)外殼組成。雖然外殼有助於推進並在體內提供出色的成像對比度,但製造工藝較爲複雜。
“早期開發的 3D 打印微型機器人雖然在系統工程上表現優異,但面向體內應用時,我們逐漸認識到兩個關鍵問題:一是結構需要進一步簡化,二是成本必須大幅降低。”高偉告訴 DeepTech,“氣泡方案正是在此背景下進入我們視野的。儘管氣泡形態看似簡單,但它在醫療領域中已有廣泛應用基礎,例如超聲成像。此外,氣泡還具有易於降解的特性,這使其更符合臨牀實際應用的需求。”
因此,團隊開發出了一套製造這種極簡氣泡機器人的方法。利用超聲波探頭震盪含有牛血清白蛋白(BSA,實驗室常用的標準動物蛋白)的溶液,從而產生了數以千計帶有蛋白外殼的微氣泡。
隨後,團隊利用了蛋白外殼的另一個特性:其表面分佈着豐富的氨基。氨基是由碳氮鍵構成的原子團,非常容易進行化學修飾。通過結合這些氨基,研究人員創造出了兩種具有不同運動控制機制的微型機器人,而諸如阿黴素(Doxorubicin)之類的抗癌藥物可以成功地結合在兩者的表面。
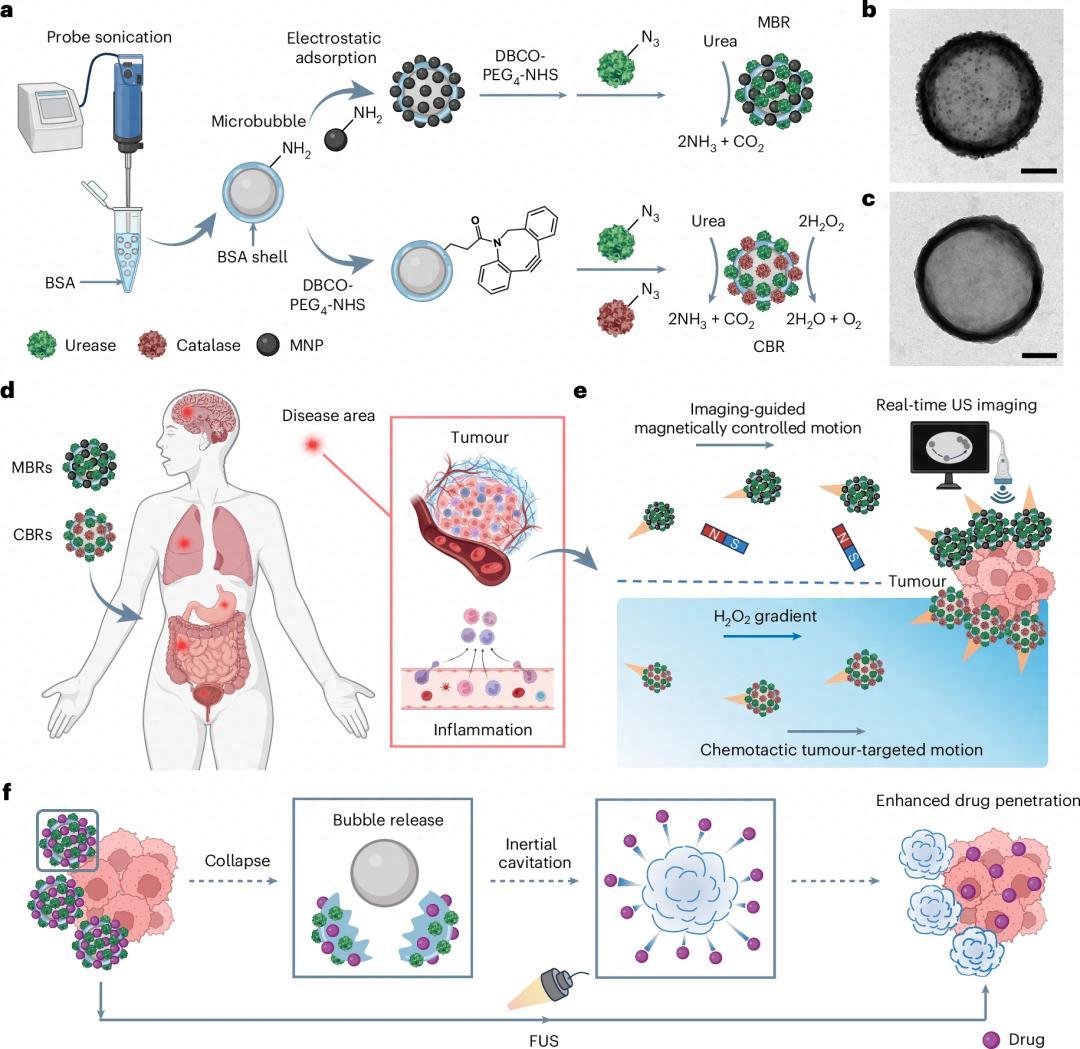
(來源:上述論文)
研究人員在兩款氣泡機器人的表面都修飾了脲酶,可分解生物體內天然存在的尿素(如血液、腫瘤微環境中的尿素),產生氨和二氧化碳氣體。由於脲酶在氣泡機器人表面的分佈並不均勻,隨時間推移,這些產物會在氣泡的一側聚集,產生濃度偏差。這種不對稱的化學環境爲氣泡提供了淨推力,驅動微型機器人前進。
“確實,讓尿素當燃料聽起來有些反直覺。在大多數人的認知裏,尿素只是代謝產生的廢物。但從化學角度來看,它在生物體內濃度極高,性質也非常穩定。”高偉補充道,“我們的核心思路是,如果機器人能夠直接從體內環境中獲取能量,實現自主驅動,將比完全依賴外部能量輸入(如超聲、磁場等)更加理想。因此,我們嘗試通過酶促反應,將尿素轉化爲可用於產生微尺度推動力的能量,從而使機器人具備自主運動能力。這種方法不僅簡化了系統設計,也提高了應用的實用性,機器人不再需要複雜的外部驅動裝置,而是藉助體內已有的燃料自主運行,更貼近未來臨牀實際應用的需求。”
面對尿素作爲燃料動力是否足以支撐氣泡機器人運動的疑問,高偉也給出了肯定的答案。
實驗數據顯示,得益於生物環境中尿素的高丰度,機器人並未出現動力衰減的現象。這種推進力足以克服生物流體的粘滯阻力,支撐機器人跨越微觀尺度的“長途跋涉”抵達病竈。這種持續、穩定的動力表現,徹底打破了人們對酶驅動機器人動力薄弱、速度緩慢的固有認知,證明了其作爲臨牀藥物遞送載體的可行性。
磁控到智能,工程受控與仿生智能互補
第一個版本爲磁控型氣泡機器人。其核心思路在於結合超聲實時成像與外部磁場控制,實現對機器人在體內運動軌跡的精準導引。通過體外成像定位,研究人員能夠操控機器人定向移動至目標區域,如腫瘤或炎症部位,從而完成治療任務。該方案側重於外部工程控制,強調定位與操控的精確性。
但研究團隊希望更進一步。“我們想讓機器人變得更聰明。”
通常情況下,腫瘤細胞代謝會產生大量過氧化氫,比正常組織高 10-100 倍,過氧化氫酶能感知這個濃度差,引導機器人向腫瘤前進。
因此,第二個版本旨在構建具備環境感知能力的智能型氣泡機器人。此版本無需依賴外部控制或成像系統,而是利用機器人自身對腫瘤微環境中特定化學信號(如過氧化氫)的感知能力,使其能夠沿着化學濃度梯度自主向腫瘤區域遷移。該設計突出了機器的智能性與自主性,體現了對生物微環境的響應與自適應特性。
“在這種情況下,你不需要任何成像,也不需要任何外部控制,機器人足夠聰明,能自己找到腫瘤,” 高偉解釋道,“氣泡機器人的自主運動,結合其感知過氧化氫梯度的能力,實現了這種我們稱之爲‘趨化性腫瘤靶向’的導航。”
研究人員通過外部磁場,能讓機器人在血管、膀胱等狹窄通道里轉彎。實驗中,在模擬血管的微流道里,磁控能讓機器人的“走偏率”從 50% 降到 5% 以下。
內部微氣泡則能增強超聲信號。除了製造簡單,氣泡內部的空氣與周圍組織形成的聲阻抗差,天然就是絕佳的超聲造影劑。研究人員在屏幕上能清晰看到機器人的運動軌跡。
當磁場難以精準覆蓋時(比如深部腫瘤),機器人也能靠過氧化氫濃度梯度自己找目標,在小鼠原位膀胱腫瘤模型中,氣泡機器人在腫瘤區域的富集量是正常膀胱組織的 4.2 倍。
“這兩種方案本質上是互補的,一個偏向於工程受控,強調人工干預的確定性;另一個偏向於環境感知,強調仿生智能的自主性。這讓我們在面對不同的臨牀場景時,有了更靈活的戰術選擇。”
此外,該氣泡機器人的穩定性表現優於預期。在體外條件下,例如在 4℃ 冰箱中低溫儲存時,其氣泡結構可保持完整至少一個月,核心功能均未發生明顯衰減。
在真實生物體內環境中,它也表現出較高的穩定性,足以維持足夠長的時間以完成將藥物遞送至目標區域的任務。同時,由於設計初衷是實現精準遞送後及時降解,機器人並不需要在體內長期存留。“這種需要時穩定、完成後降解的特性,恰好符合我們對於理想遞送系統的期待,既保證遞送過程可靠,又避免在體內產生不必要的殘留。”
90% 高效釋藥,腫瘤減重 60%
一旦氣泡機器人抵達腫瘤位置,其攜帶的藥物可實現緩慢而穩定的釋放。此外,研究人員也可以通過施加超聲來主動觸發並加速藥物釋放,從而在目標區域內實現更快、更集中的給藥。
超聲在此過程中發揮雙重作用:一方面,它可作爲外部觸發信號,促進藥物快速釋放;另一方面,氣泡在超聲作用下破裂時產生的力學效應,能夠增強藥物在腫瘤組織中的滲透能力。這種“氣泡爆炸”效應爲藥物遞送提供了額外的動力,有助於藥物更深入地進入腫瘤組織,提升治療效果。
實驗顯示,超聲觸發的藥物釋放率達 90% 以上,且正常組織區域幾乎沒有藥物泄漏。氣泡機器人也在超聲作用下會發生“爆炸”,產生的機械力能“撕開”腫瘤基質的小縫隙,讓藥物穿透深度提升 2.5 倍。在三維腫瘤球體實驗中,藥物能從表面深入到球體內部 100 μm(相當於 3 個細胞層),而普通藥物只能停在表面。
當科學家爲患病小鼠注射氣泡機器人進行治療時,在 21 天內,其膀胱腫瘤的重量比僅接受常規藥物治療的小鼠減輕了約 60%。
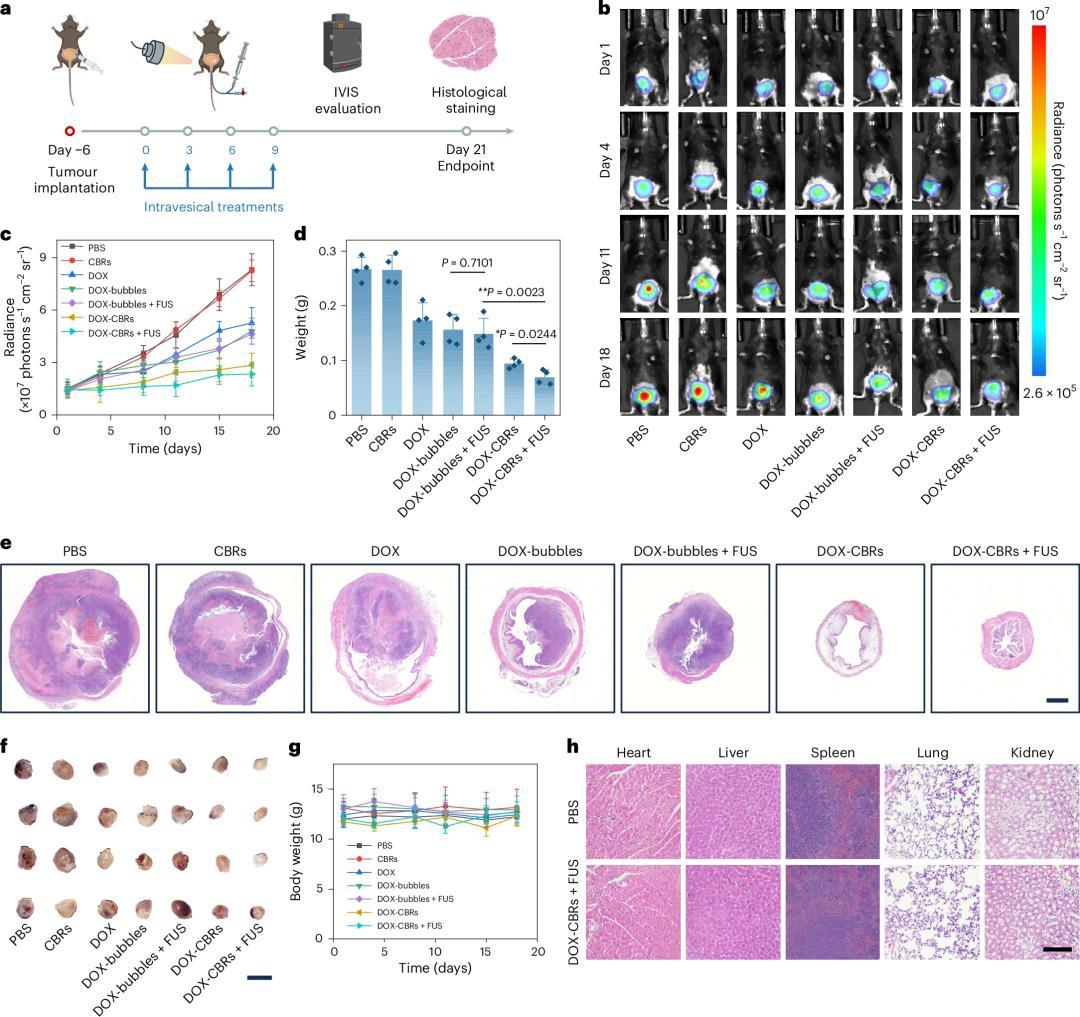
圖 | 利用原位膀胱腫瘤模型評估微型氣泡機器人體內抗腫瘤效果(來源:上述論文)
高偉介紹,選擇膀胱癌作爲動物實驗模型,主要基於以下幾個方面的考量:
首先,膀胱環境在生理上非常適合本研究。膀胱內尿素濃度較高,且存在豐富的生物流體,爲基於尿素驅動的氣泡機器人提供了理想的天然工作環境。
另一方面,膀胱癌目前的臨牀治療存在顯著挑戰。傳統灌注療法難以使藥物有效滲透至腫瘤組織內部,治療效果受限。這款氣泡機器人具備自主運動與精準定位能力,配合超聲增強的藥物滲透效應,正好能夠針對這一痛點提供潛在解決方案。”
“因此,膀胱癌模型既具備利於技術驗證的生理條件,又代表着存在明確未滿足臨牀需求的疾病類型,使其成爲一個具有代表性的理想起點。當然,這項技術的應用未來並不侷限於膀胱癌。”
目前,高偉團隊已在實驗室中開展多種不同部位腫瘤模型的探索。“膀胱腫瘤僅是我們選擇的第一個起點模型。”
關於其應用場景,在高偉看來,該機器人本質上是一個遞送平臺,並不侷限於單一疾病。其核心優勢在於主動運動、精準定位及可控釋放,因此不僅可用於遞送傳統藥物,也可搭載基因藥物、免疫製劑或其他治療分子,未來還可擴展至診斷與成像領域,例如遞送成像增強粒子以改善醫療診斷。
在下一步研究計劃中,高位團隊計劃從以下幾方面推進:一是將該平臺應用於更多疾病模型;二是在同一疾病模型中深化研究,提升技術成熟度,包括在更大的動物體上進行驗證。最終目標是推動該技術向臨牀轉化,實現在人體中的應用。
參考鏈接:
1.Tang, S., Han, H., Ma, X. et al. Enzymatic microbubble robots. Nat. Nanotechnol. (2026). https://doi.org/10.1038/s41565-025-02109-6
排版:胡莉花



