我們日常使用的手機、相機都是 2D 成像,只能捕捉平面畫面;如今常見的 3D 成像技術,比如人臉識別、掃地機器人的避障系統,能感知物體的遠近和立體形狀,但卻少了關鍵的動態感知能力。就像掃地機器人能看清地上的拖鞋,卻未必能及時判斷滾過來的籃球速度,容易出現 “慢半拍” 的碰撞。
近日,總部位於瑞士蘇黎世的 Pointcloud 公司的科研團隊在 Nature 發表成果,他們成功開發出一款 4D 成像傳感器,除了知道物體的位置,它還能測出物體的速度。
更重要的是,它像 CMOS 相機芯片一樣實現了高度集成,讓曾經昂貴笨重的 4D 成像技術,有望走進普通生活。
Pointcloud 由前英特爾光子學專家雷穆斯·尼古拉埃斯庫(Remus Nicolaescu)創立,目標是將激光雷達(LiDAR)從笨重設備壓縮成芯片級高性能 4D 成像解決方案。

圖 | 雷穆斯·尼古拉埃斯庫(來源:領英)
五年間,Pointcloud 的成果兩度登上 Nature 雜誌,2021 年與南安普頓大學合作,首次展示硅光子通用 3D 成像傳感器。隨後穩步推進工程樣品,2024 年發佈 192×64 像素短中距樣品,並推出開發套件;2025 年升級到更高像素陣列。目前,該公司已獲百度風投等多家機構注資。
要理解這個成果之前,我們得先聊聊機器是怎麼“看”世界的。
爲了讓機器像人類一樣感知世界,最初是通過我們最熟悉的攝像頭。攝像頭本質上是在拍照片,它捕捉的是光影和顏色。雖然機器通過人工智能可以識別出那是“紅綠燈”或者“行人”,但在它眼裏,世界是“扁平”的。它很難準確判斷車輛離自己到底是 5 米還是 5.5 米。這種模糊的深度感知,正是自動駕駛早期在面對靜止障礙物時頻發事故的主因——因爲它“看”到了物體,卻“感覺”不到距離。
爲了解決距離問題,工程師給機器裝上了激光雷達(LiDAR)。它像蝙蝠一樣,通過向外發射激光並接收回波,計算光速往返的時間來測量距離。這一躍遷讓機器擁有了“深度”,世界在它眼中變成了由無數點雲組成的 3D 雕塑。但仍存在致命硬傷:它看不出“動態”。
如果你想知道前面那輛車跑得有多快,系統必須像做物理題一樣,連續拍下兩組 3D 數據,通過計算物體在兩次掃描間的位移差,去“猜”對方的速度。這種靠計算得出的結論存在微小的延遲,但在時速百公里的高速路上,零點幾秒的延遲往往就意味着生與死的差別。
這項研究所展示的 4D 成像技術,引入了物理學中的“多普勒效應”。簡單說,就是當激光射向一個移動物體時,反射回來的光波頻率會發生變化。這塊芯片在抓取 3D 空間座標的同時,能瞬間讀出這個頻率變化,從而直接“看”出物體的瞬時速度。
目前的 4D 成像傳感器研發主要包括兩條技術路線:4D 毫米波雷達,以及 4D 激光雷達。
在汽車領域,博世(Bosch)、大陸(Continental)、採埃孚(ZF Group)以及以色列的 Arbe 等巨頭,都在主推 4D 毫米波雷達。
這種雷達是在傳統雷達的基礎上增加了“高度”信息,且具備一定的測速能力。它不懼風雪霧霾,且成本已經控制到了幾百美元,正大規模裝載在 2025-2026 年推出的中高端車型上。但毫米波雷達的分辨率較低,看世界就像隔着一層毛玻璃,能看到有東西在動,卻看不清那是誰。
相比雷達,激光(光子)的波長更短,這意味着它能看清極其細微的細節,比如路面上一個小小的石塊,或者行人的手勢。此前的激光雷達(LiDAR)雖然清晰,但非常“嬌氣”且笨重。包括谷歌旗下的 Waymo、通用的 Cruise 等都在死磕“固態激光雷達”。大家的目標只有一個:把一整套雷達系統塞進一塊芯片裏。
這也正是這項研究最令人驚歎的方面,研究人員把超過 60 萬個光學元件+電子元件都集成在一塊芯片上,體積和普通 CMOS 相機芯片差不多。而且核心是 352×176 的像素陣列,總共約 6.2 萬個像素,是之前同類技術的 5 倍。
在設計上,研究團隊用了幾個 “巧招” 讓傳感器又強又實用。
單像素 “收發一體”。每個像素又能發射激光,又能接收反射光,不用單獨裝發射器和接收器,既省空間又避免了光線錯位的問題。
硅光子+CMOS 混合集成:用成熟的硅光子工藝做光學部分,再跟標準 CMOS 電子工藝無縫對接。所有驅動、校準、數字接口全長在芯片上,不需要外部一堆分立元件。
智能光開關控制。不能所有 6 萬像素同時發激光,那芯片會燒掉。他們在芯片上做了熱光開關,像流水線一樣輪流給不同像素組發光。而且開關速度超快,不影響幀率。
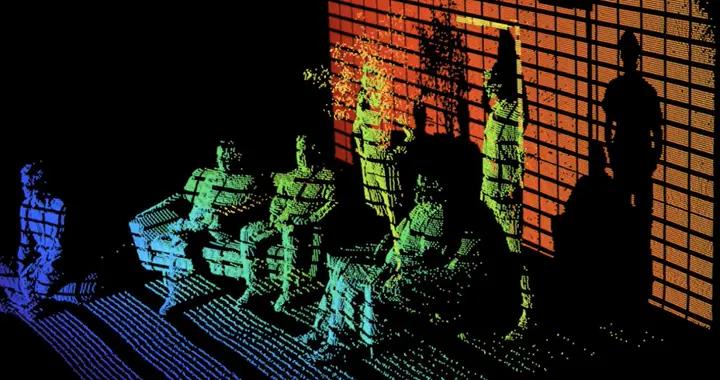
團隊在多種環境中測試了這款傳感芯片,以考察其處理不同距離和運動的能力。在掃描場景後,它能將場景重構爲由數千個數據點組成的 3D 數字地圖。該系統成功繪製了 6-11 米距離內的室內房間地圖。
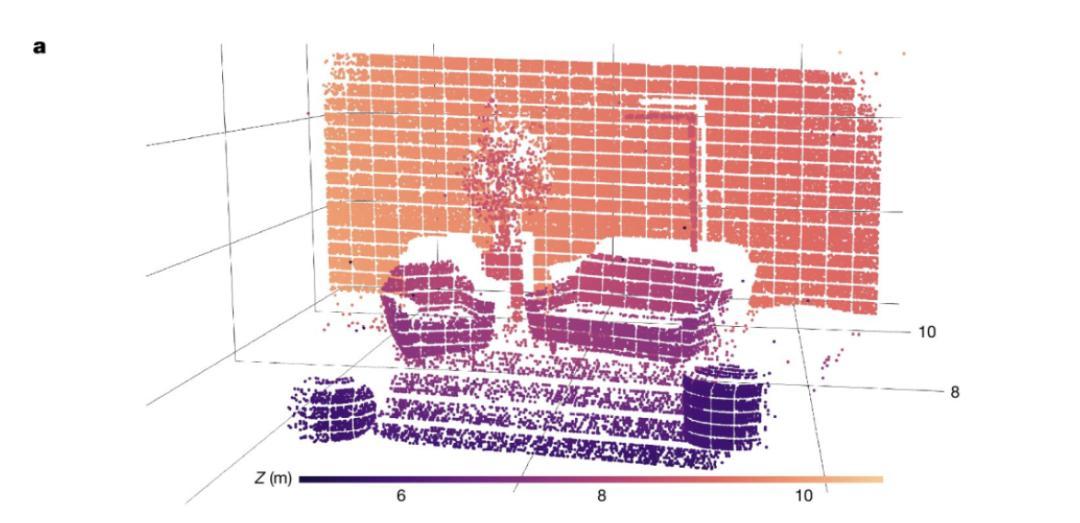
圖 | 單次採集獲得的辦公室場景(來源:上述論文)
爲測試其測距範圍,科學家將其對準 65 米外的一棟建築,其成像能力足以捕捉到窗戶和陽臺等細節。此外,最高能達到 15 幀/秒,相當於每秒拍 15 張 4D 畫面,能實時捕捉運動的物體,比如旋轉的圓盤、移動的汽車,不會出現 “拖影” 或數據滯後。
而且激光功率特別低,完全不會傷眼睛,適合裝在汽車、手機、機器人上。
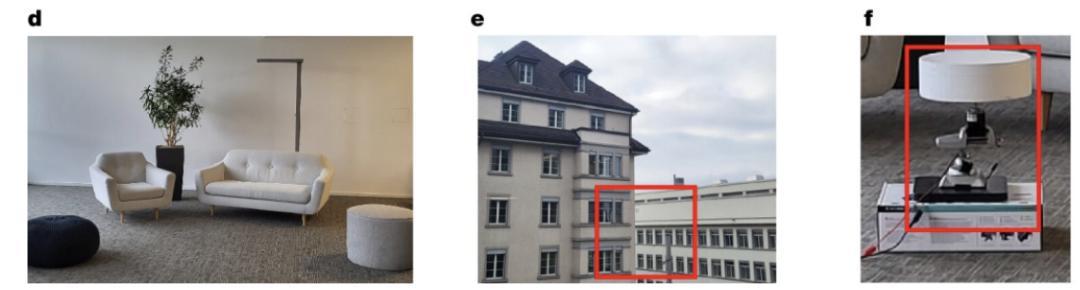
(來源:上述論文)
目前,研究團隊仍需進一步完善這款芯片。比如,引入氮化硅材料,解決硅的功率限制,將單個像素功率提升 10 倍;結合噪聲優化,探測距離將從 65 米飆升至 200 米以上,滿足高速自動駕駛的核心需求;以及將開關移出陣列,消除畫面縫隙,讓機器擁有絲滑、全無死角的高清 4D 電影視野。
參考鏈接:
1.Settembrini, F.F., Gungor, A.C., Forrer, A. et al. A large-scale coherent 4D imaging sensor. Nature 651, 364–370 (2026). https://doi.org/10.1038/s41586-026-10183-6
運營/排版:何晨龍