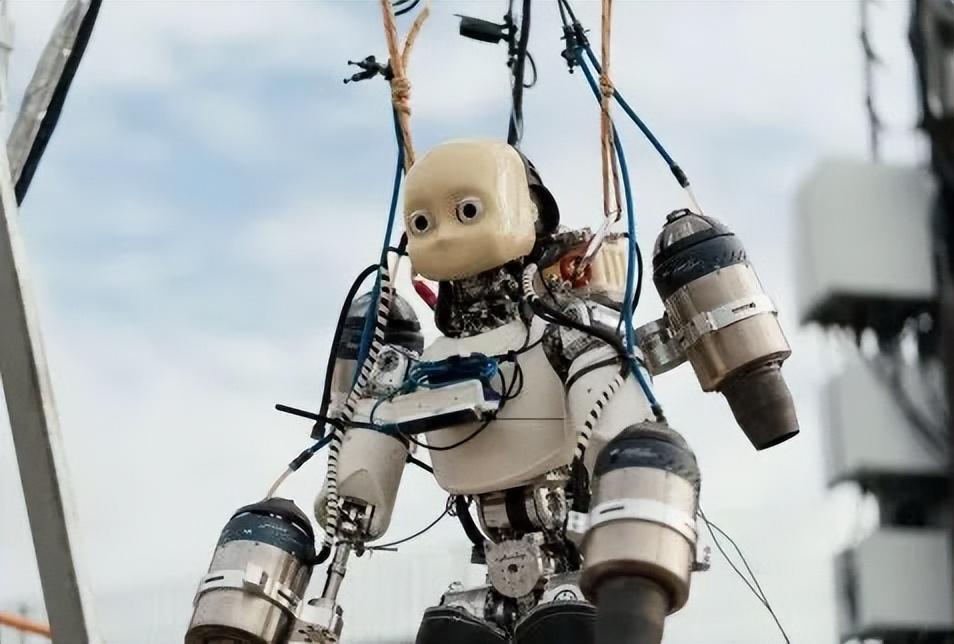
這個揹着噴氣揹包的娃娃臉機器人,是世界首個由噴氣揹包驅動的飛行機器。當它被吊帶吊起之後隨即啓動推進器,並從地面升空大約 50 釐米。
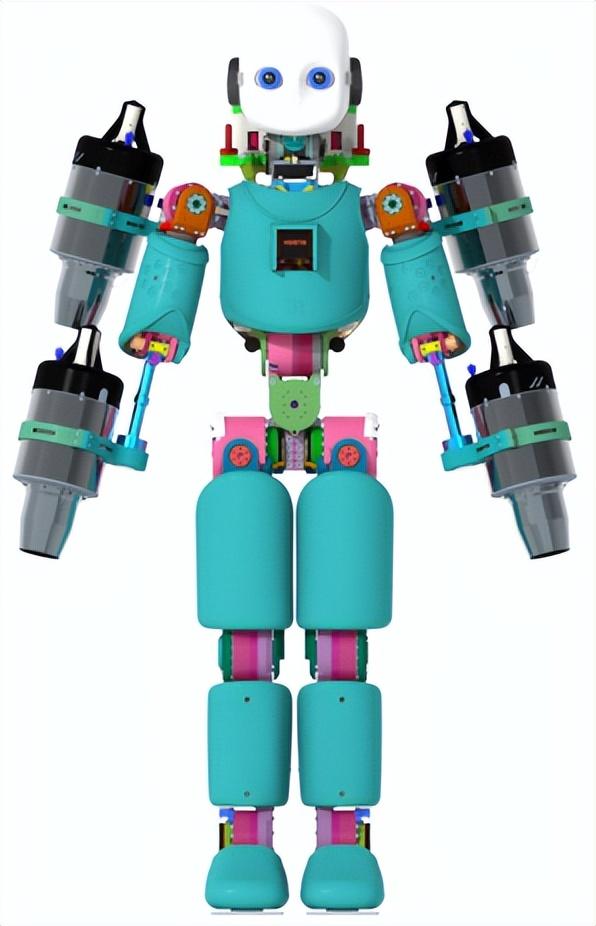
該機器人的名字叫做 iRonCub-Mk3 機器人,由意大利技術研究院團隊打造而來。其身高大約 1 米,體重大約 22 千克,身體尺寸設計得像孩童一般,並長着一張極具辨識度的光滑閃亮的娃娃臉。
它在起飛時使用四個推進器,其中兩個安裝在手臂位置,另外兩個安裝在噴氣揹包裏。
此次飛行意味着該人形機器人實現了首次垂直起飛,向製造能夠模仿人類能力的飛行機器人邁出了重要一步。
圖 | 相關論文(來源:arXiv)
相關論文的第一作者是意大利技術研究院博士生達維德·戈爾巴尼(Davide Gorbani)。
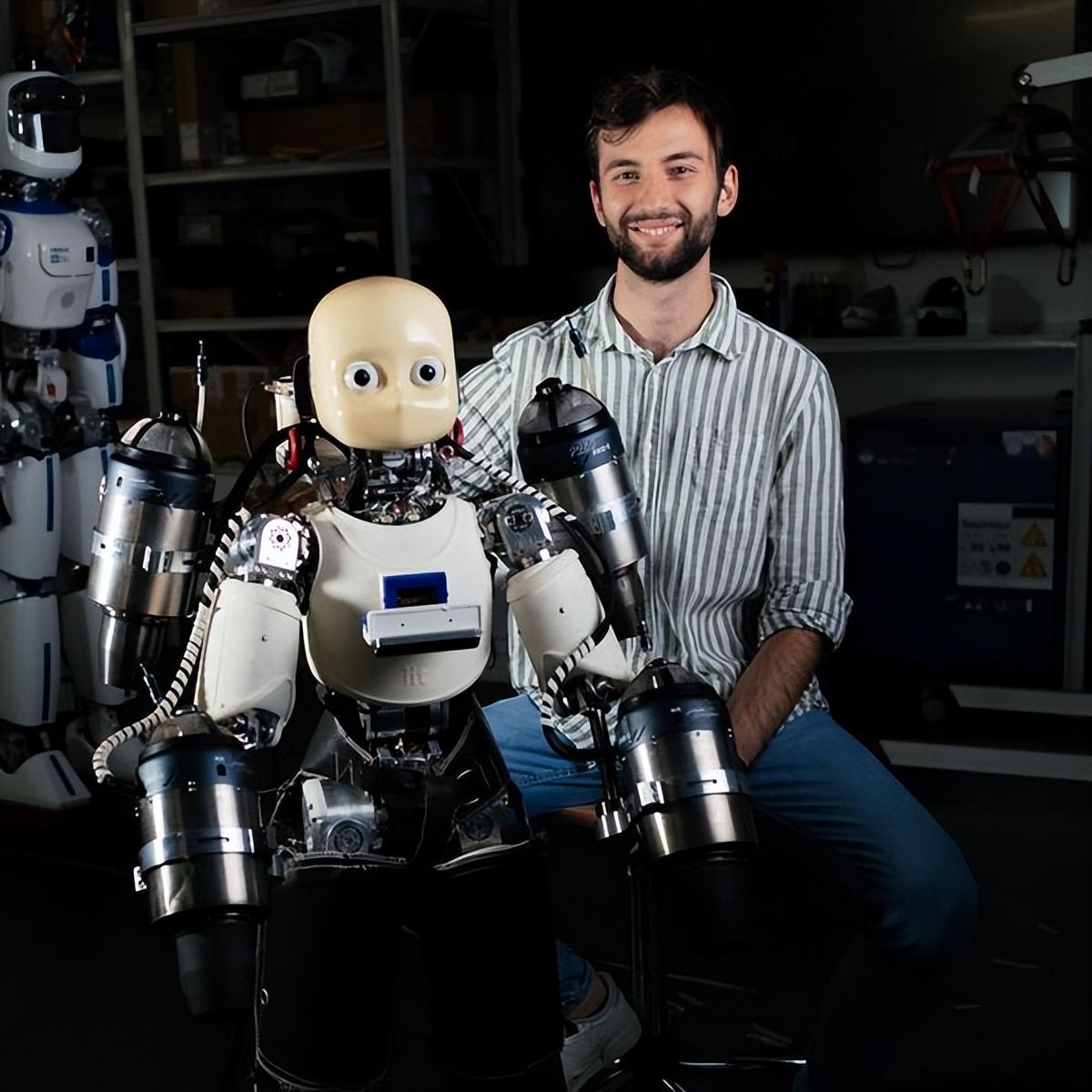
圖 | 達維德·戈爾巴尼(來源:https://www.iit.it/people-details/-/people/davide-gorbani)

實現具有預定軌跡和能被精確跟蹤的飛行
據瞭解,本次機器人基於意大利技術研究院的 iCub3 平臺。在使用時,該平臺由佩戴 VR 頭盔式平視顯示器的操作員進行遠程控制,進而能夠讓機器人模擬多種人類能力。
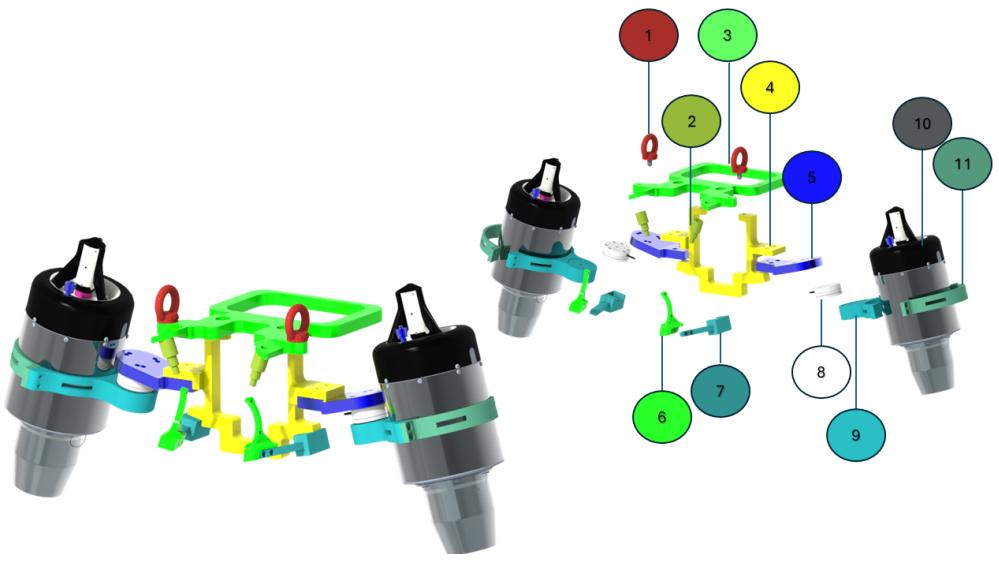
爲了讓機器人實現飛行,研究團隊爲它安裝了承重支架來固定噴氣揹包,並增加了一個新的鈦合金脊柱來支撐揹包。
相比上一代,這款機器人的前臂和手特意被移除,以便爲安裝在手臂上的推進器騰出空間。但是,研究團隊表示,如果需要仍然可以在後續版本中將手臂重新安回去。
(來源:arXiv)
爲了確保機器人底盤能夠承受起飛和飛行時的壓力,研究團隊進行了有限元法(FEM,Finite Element Method)分析,以便將機器人結構分解爲相互連接的更小組件,這讓他們得以針對噴氣發動機的支架施加 750 牛頓的軸向載荷。
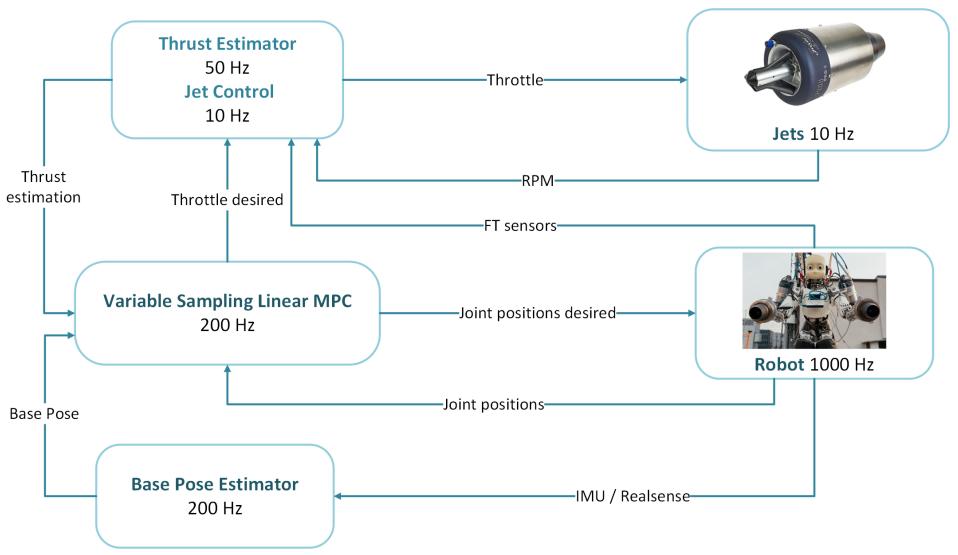
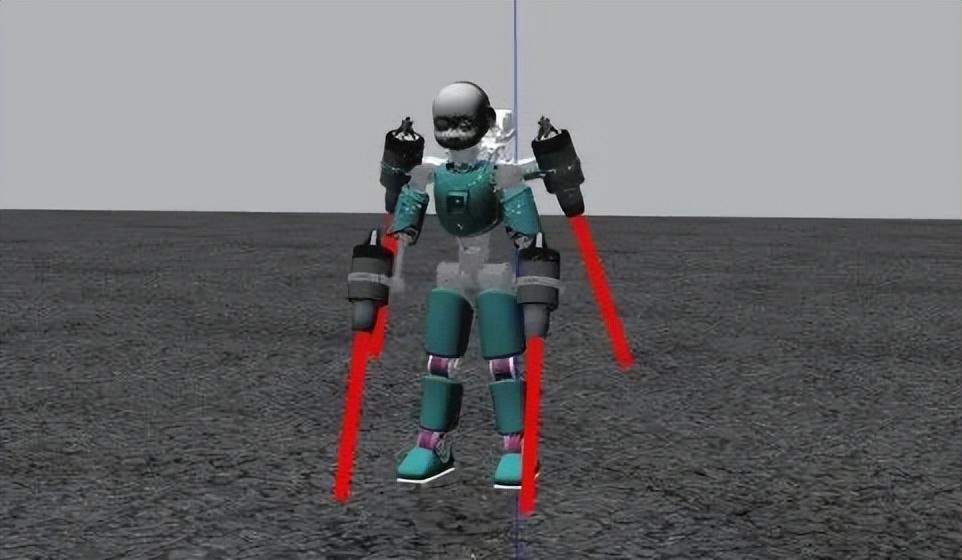
同時,爲了讓本次機器人實現飛行,必須考慮所有關節和驅動點,並將它們和推進器進行協調,以確保機器人不會偏離航向或上下顛倒地飛行。
爲此,研究團隊通過一種名爲線性參數時變模型預測控制(MPC,Model Predictive Control)的複雜飛行控制器實現了這一目標,與此同時,還能持續計算最優關節位置與推進器油門開度。
在測試時,研究團隊先是在計算機模擬中針對系統進行測試,隨後才進行真實世界測試。之所以這樣做,是因爲操作排氣溫度超過 600℃ 的推進器存在較高的安全風險。最終,他們成功演示了上述具有預定軌跡和能被精確跟蹤的飛行。
(來源:arXiv)
據瞭解,此前許多機器人平臺通常僅僅專注於地面移動和操作,而本次機器人具備空中移動能力。一言以蔽之,這種機器人既能飛行,又能與環境互動,還可以清理廢墟,也可以協助定位甚至營救受害者。這可能會爲協助執行搜救任務、穿越倒塌建築和淹水區域或進入人類無法進入的其他地形帶來幫助,也可以讓其針對人類難以接近的結構,比如橋樑底部進行維修,甚至可以將其部署在人類無法安全操作的危險環境中,比如核泄漏現場或化學物質泄漏現場。

當機器人從地面啓動升空
據介紹,本次飛行實驗在意大利技術研究院機器人與智能系統中心的露臺飛行區域進行,從谷歌地球獲取的該建築的三維重建圖如下圖所示。

(來源:arXiv)
該實驗設施由三個主要區域組成:首先是 iRonCub 區域,這也是執行實驗飛行的主要測試區。其次是控制室,這是軟件執行和實時監控的操作中心,位於距離飛行區安全的位置。再次是儲藏室,這是一個有遮擋的安全儲藏區域,用於存放實驗所需的設備和燃料系統。下圖展示了進行實驗的 iRonCub 區域,圖中也展示了供應噴氣發動機的燃油管路,其中噴氣燃料儲存在防爆容器內的油箱中。

(來源:arXiv)
實驗中,機器人被懸掛在 2 米高的起重機上,這樣做既能提供足夠的機動性,又能保持牢固的繫留狀態,從而能夠避免在控制器出現故障時發生事故。
爲了幫助散熱並保護機器人避免受到過熱影響,機器人的底部覆蓋耐熱氣凝膠材料,這可以使其免受噴氣排氣高溫的影響。
此外,研究團隊還在地面上放置了與水泥磚相匹配的升高平臺,以便能夠抬起機器人,進而在測試過程中最大限度地減少熱量積聚。
在控制室內,有一臺筆記本電腦通過安全外殼協議(SSH,Secure Shell)連接至機器人的“車載計算機”,從而能夠針對所有控制模塊和估計軟件模塊進行遠程作業。同時,還有一臺專用機器處理來自固定網絡攝像頭的數據記錄和視頻錄製。
(來源:arXiv)
另據悉,本次實驗使用的數據採集系統能夠支持實時遙測可視化,這有助於在飛行過程中監控系統性能。而在每個實驗環節中,有兩名真人實驗成員留在控制室監督軟件操作,同時有一名真人實驗成員在實驗區域附近保持安全距離。
那名在實驗區域的真人實驗人員可以直接監控實驗,以便彌補控制室可能出現的任何溝通延遲,同時負責報告任何從內部可能無法立即察覺的問題。
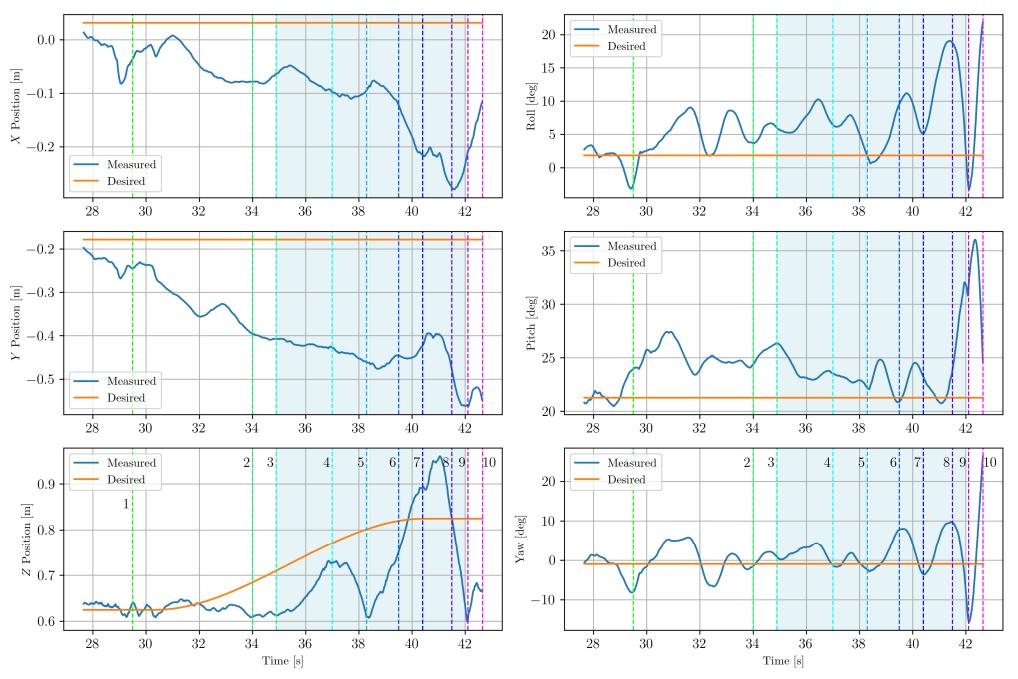
爲了測試整體軟件架構,研究團隊讓機器人執行起飛操作,並將高度提升約 1 米,以及讓其沿着正方形軌跡飛行。下圖展示了控制器在軌跡跟蹤方面的性能,由於這是一條相當緩慢且平滑的軌跡,因此機器人能夠很好地跟隨它。
(來源:arXiv)
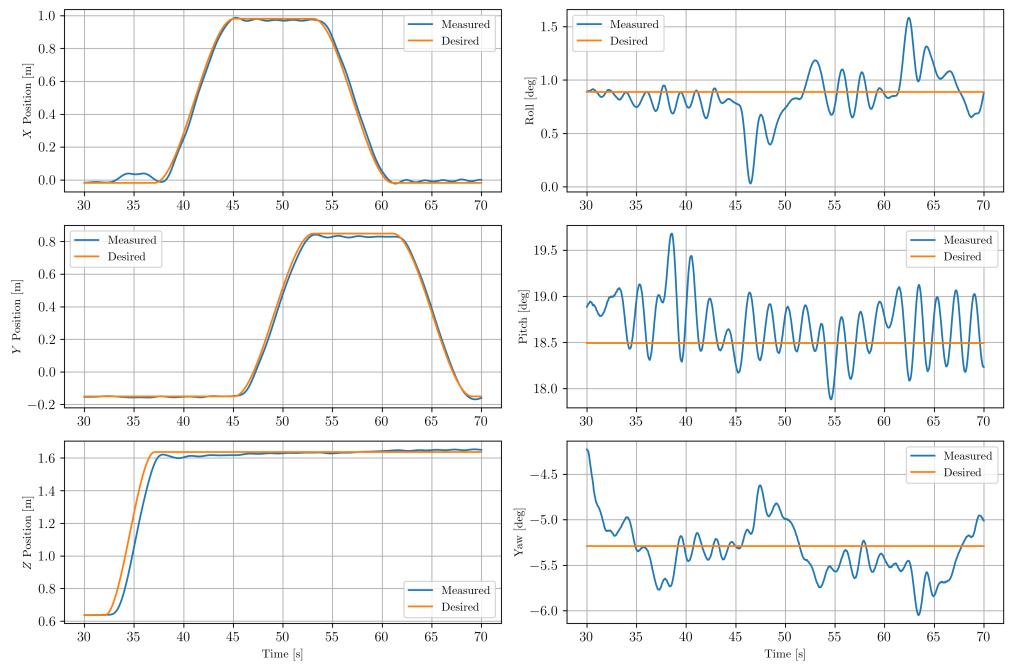
起飛階段大約從 t=5 秒開始,到 t=30 秒結束。在這一點之後,沿垂直(z)軸的參考軌跡開始上升,促使機器人從地面啓動升空。下圖展示了機器人質心(CoM,centre of mass)和基座方向的跟蹤性能。
(來源:arXiv)
在整個測試過程中,機器人將其橫滾角、俯仰角和偏航角保持在約 5 度的範圍內。儘管如此,機器人在水平面上還是出現了明顯的偏移,沿 x 軸的位移約爲 -20 釐米,沿 y 軸的位移約爲 60 釐米。
而在參考指令發出約 2.5 秒後,z 座標開始增加,這標誌着起飛正式開始。接着,機器人在空中保持了大約 3 秒的飛行狀態,短暫着陸後再次起飛,並繼續超出目標高度飛行了 3 秒。最後,機器人高度下降,且在姿態誤差超過指定限值後,由飛行控制器自動斷電。
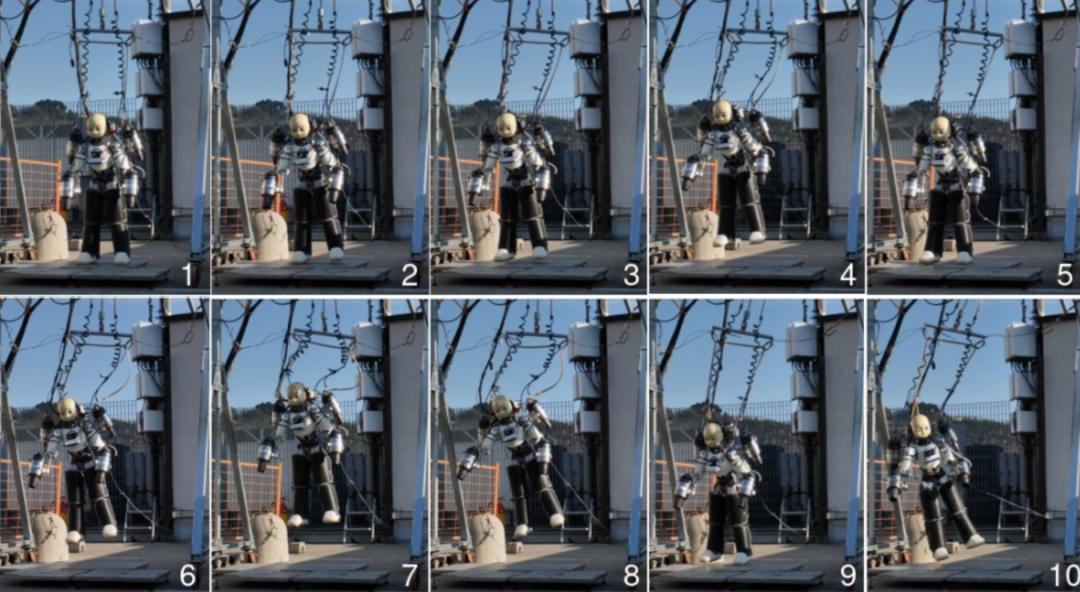
圖 | 此次飛行測試的幀圖像(來源:arXiv)
儘管這是一次相對成功的試飛,但是依然存在一些不足。研究團隊認爲,機器人之所以與預期行爲存在偏差,主要與仿真和現實之間的差距有關。
具體來說:
首先,模型預測控制框架依賴於噴氣動力學的簡化模型,因此該模型無法準確捕捉渦輪機的高動態特性。其次,噴氣推進系統會引發振動,這些振動會通過機器人結構傳播,並影響機載慣性和速度估計傳感器,導致測量數據含噪,進而降低控制性能。此外,力-扭矩傳感器的校準仍然是一項難題,而推力估算的不準確性會進一步加劇控制難度。
(來源:arXiv)
但是,本次機器人所搭載的系統將噴氣推進技術與全身控制架構實現了成功結合,從而能夠使用人形結構進行垂直飛行,這些結果證實了控制流程在理想環境下的有效性,併爲實際部署奠定了堅實基礎。
未來,研究團隊在新的實驗設置中計劃實現可重複的完整起飛和着陸。另外,他們還將改進機器人基座位姿和推力估計。同時,其也將增強模型預測控制器的魯棒性,以更好地處理建模不準確和外部干擾等問題,預計這些改進將成爲邁向人形機器人實現穩定自主空中運動的關鍵步驟。
(來源:arXiv)
值得一提的是,本次研究團隊所在的意大利技術研究院,曾被 Nature 列入世界前 50 名新星科學研究所名單中。該研究院聚焦機器人、納米材料、生命科學與計算機科學四大領域。在機器人領域,該機構開發了 iCub、HyQ 等腿足式機器人平臺,其中 iCub 正是本次飛行機器人的原型。而該機構的串聯彈性驅動器技術已通過 Alberobotics 公司實現商業化。
參考資料:
https://arxiv.org/pdf/2506.01125
https://www.iit.it/people-details/-/people/davide-gorbani
https://github.com/ami-iit/paper_gorbani_mohamed_2025_ironcub3
https://alberobotics.it/
運營/排版:何晨龍