在具身智能領域,現有觸覺系統長期面臨一個根本性挑戰——難以同時實現對“接近-接觸”全過程的連續感知。傳統方法往往依賴多個異構傳感器,造成信號解耦、系統複雜且不易集成。
基於此,廈門大學廖新勤副教授團隊意識到,若能構建一種具備全流程連續感知能力的單體傳感界面,將極大提升機器的感知一致性與響應效率,爲人機交互和自主決策提供更自然、更緊湊的感知基礎。
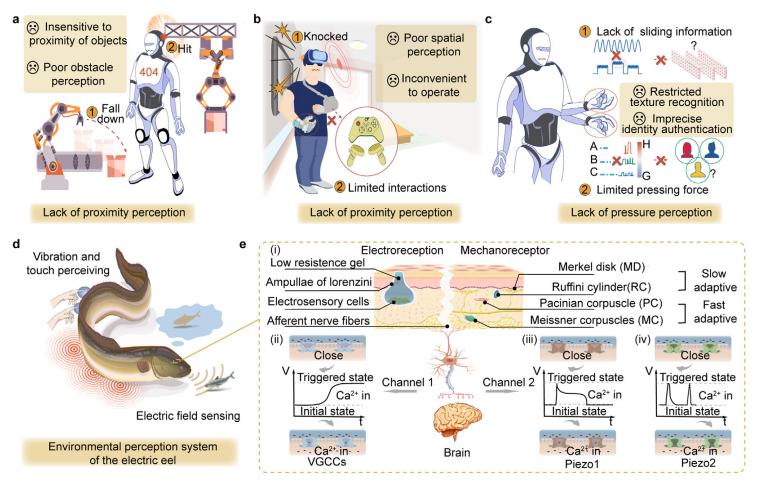
該團隊受到電鰻的“電-機械融合感知”傳感機制啓發,設計了一種具備接近與壓力雙感知功能的一體化仿生電鰻觸覺界面(Bio-EE,Bioinspired electric eel),不僅打破了對傳統異構傳感器的依賴,還實現了感知連續性、系統緊湊性與信息耦合性的統一,爲具身智能中的高效觸覺交互提供了新思路。
該界面實現了 7cm 範圍內對 500μm 空間變化的準確感知。需要了解的是,傳感界面需具備極高的電場響應靈敏度和空間分辨能力。他們在設計中引入了鈦酸銅鈣材料,其優異的介電性能顯著增強了對微弱電信號的響應能力,既支撐了釐米級的非接觸感知距離,也爲高分辨率探測提供了材料基礎。
微結構部分則採用了高精度 3D 打印工藝進行構建,具有良好的結構一致性和參數可調性。廖新勤對 DeepTech 表示:“我們的工藝已經在實驗室摸索很久了,目前在小範圍量產方面面臨的瓶頸較小,具備良好的工程化前景。”
圖丨廖新勤(來源:廖新勤)
日前,相關論文以《介電改性聚合物和拓撲優化微結構實現多功能人機交互中的傳感器內解耦》(Dielectrically Modified Polymer and Topologically Optimized Microstructure Enabling In-Sensor Decoupling forMultifunctional Human–Machine Interactions)爲題發表在 Advanced Functional Materials[1]。廈門大學博士生林萬勝是第一作者,廖新勤副教授擔任通訊作者。
圖丨相關論文(來源:Advanced Functional Materials)
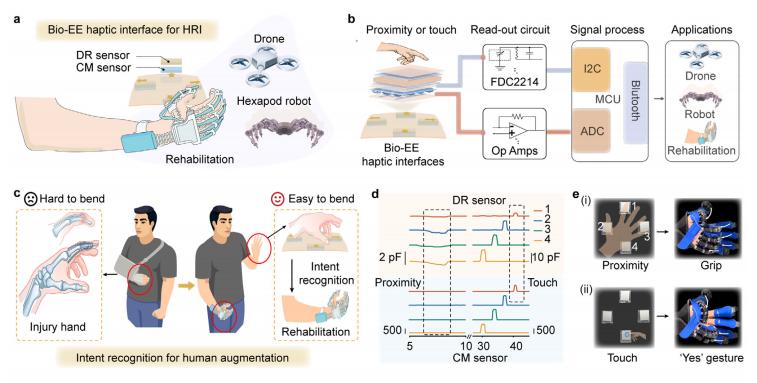
Bio-EE 首創的“雙通道仿生結構”通過將雙響應(DR,dual-response)傳感器(邊緣場擾動)與複合微觀結構(CM,composite microstructure)傳感器(接觸面積調控)協同集成,實現了從非接觸到接觸全過程的感知維度融合。
其中,DR 通道負責感知物體靠近時對電場分佈的擾動,能夠在釐米級距離內實現高靈敏度、無接觸探測;一旦物體發生接觸,CM 通道則通過微結構變形響應不同強度的壓力,實現百 kPa 量程的高精度壓力識別。
圖丨Bio-EE 觸覺界面的設計概念(來源:Advanced Functional Materials)
二者在硬件結構上相互獨立、信號上耦合協同,構建出具有“先感知、再響應”的連續感知邏輯。其原理與汽車預碰撞系統相似:雷達和攝像頭在遠距離識別前方障礙物(對應 DR 通道的非接觸感知),一旦距離過近,系統啓動緊急制動並感知碰撞強度(對應 CM 通道的壓力識別),實現由預警到精確響應的閉環感知過程。這種“雙通道協同”設計賦予了具身智能系統類生物的動態響應能力。
在康復外骨骼應用中,Bio-EE 通過其雙通道仿生結構實現了“預判式響應”機制,即利用 DR 通道對用戶動作意圖進行非接觸提前感知。在手指或肢體尚未接觸裝置前,判斷出接近行爲,從而提前激活系統準備狀態,避免因癱瘓或運動障礙患者無意識觸碰或遲緩反應導致外骨骼誤觸啓動、引發二次傷害。一旦真正接觸發生,CM 通道則對接觸強度進行精準評估,確保系統按需響應,爲實現安全、漸進式的交互控制提供了技術支撐。
此外,其 120Hz 高頻振動響應能力賦予了假肢系統對高頻率、快速變化觸覺信號的感知能力,使用戶在操作如夾取、旋轉、滑動等精細任務時獲得更貼近真實手感的動態反饋。“這能夠極大提升假肢與神經系統之間的信息閉環效率,具備重要的意義。”廖新勤表示。
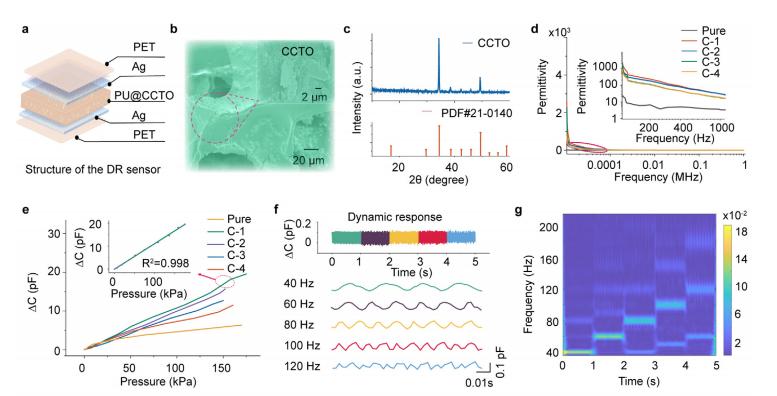
圖丨Bio-EE 觸覺界面的形貌特徵(來源:Advanced Functional Materials)
值得關注的是,Bio-EE 通過集成可編程的痛感反饋系統,實現了從現實世界中的觸覺意圖識別驅動虛擬場景,到虛擬環境中的實時事件反饋指導現實用戶操控的閉環控制,精準解決了虛擬現實(VR,Virtual Reality)醫療培訓中缺乏真實觸覺反饋的問題。
傳統 VR 系統往往只能提供視覺與聽覺刺激,難以模擬手術、穿刺等操作中關鍵的觸覺與痛覺差異,影響操作者對力控節奏、操作深度的判斷。
該系統集成了 Bio-EE 觸覺界面的高精度意圖識別和陶瓷熱電偶陣列的可編程疼痛調控,在關鍵操作時刻提供定量可調的觸覺/痛覺反饋,可幫助受訓者建立更真實的動作-感覺關聯,提高操作敏感性與容錯控制能力。
溫度陣列的加入則進一步拓展了系統的多模態感知維度,使冷熱、痛癢等感知要素可同步疊加呈現,爲構建高度擬真的沉浸式訓練環境提供關鍵支撐。“這一融合趨勢預示着多模態感知將成爲下一代人機交互的核心標準,不僅適用於醫療培訓,也將推動遠程診療、神經康復與情感交互等場景的技術革新。”廖新勤表示。
圖丨基於 Bio-EE 觸覺界面的非接觸機器人控制(來源:Advanced Functional Materials)
該技術具備從精細觸覺識別到無接觸感知的廣泛應用潛力:
在醫療康復領域,它能夠提升假肢與外骨骼的操作靈敏度與安全性,實現精準的預判式輔助,減少患者誤操作帶來的風險。
在虛擬現實與增強現實中,通過多模態觸覺與痛感反饋,顯著增強沉浸感和交互真實性,推動醫療培訓、遠程手術及虛擬仿真等高要求場景的發展。
在智能機器人與人機交互領域,該技術支持機器人對環境和人體動作的高精度感知,實現更自然的協作與反饋。整體來看,這項技術通過融合多維觸覺感知,正推動具身智能向更高水平發展,賦能多行業實現更安全、高效和人性化的智能交互體驗。
據介紹,研究團隊計劃將該技術在實際應用中落地並規模化推廣。目前,已在積極尋求與虛擬現實和機器人技術企業的合作機會,致力於將多模態觸覺感知與反饋系統集成到康復外骨骼、虛擬培訓平臺以及智能機器人等產品中。
此外,他們還關注製造工藝的優化與成本控制,確保技術具備良好的工業化生產潛力。通過產學研結合,希望加速技術從實驗室走向市場,推動具身智能在醫療、教育、製造等多個領域實現創新突破和廣泛應用。
在本次研究基礎上,研究團隊接下來將重點推進觸覺感知系統在複雜環境下的多模態融合與動態響應能力,進一步提升系統的穩定性和精準度。
在材料創新方面,他們計劃開發更柔性、輕薄且具備自愈功能的新型傳感器,以滿足穿戴設備對舒適性和耐用性的需求。在攻克科學難題方面,如何突破高分辨率非接觸感知與長距離探測之間的矛盾,提升痛覺反饋的安全性和可控性,以及實現多模態觸覺信號的實時智能解碼與閉環控制,依然是該團隊持續重點攻關的方向。
總體來說,Bio-EE 仿生觸覺界面通過融合高精度的多模態觸覺感知與可編程反饋,實現了對環境細微變化和自身狀態的實時感知與響應,極大增強了具身智能系統的感知深度和控制精度。
這種深度交互能力使系統能夠自主調整行爲策略,更好地適應複雜多變的應用場景,從而推動具身智能在自主決策、環境適應和人機協作等方面邁向更高層次的發展。
參考資料:
1.Wangsheng Lin et al. Dielectrically Modified Polymer and Topologically Optimized Microstructure Enabling In-Sensor Decoupling for Multifunctional Human–Machine Interactions. Advanced Functional Materials 2505912(2025). https://doi.org/10.1002/adfm.202505912
運營/排版:何晨龍