
近年來,隨着諾貝爾獎成果“組成大腦定位系統的細胞”的深入研究,哺乳動物大腦在空間感知和導航行爲中的生物機制逐漸明晰。然而,如何將這一生物機制有效地應用於真實場景的具身導航任務,成爲當前類腦導航工程應用的重要挑戰。現有的具身智能體通常基於高性能計算設備和傳統人工智能算法,在自主執行探索與導航任務時,往往會消耗大量的計算資源,無法實時模擬哺乳動物對空間環境的動態感知和策略調整,難以高效地完成複雜環境下的導航任務。
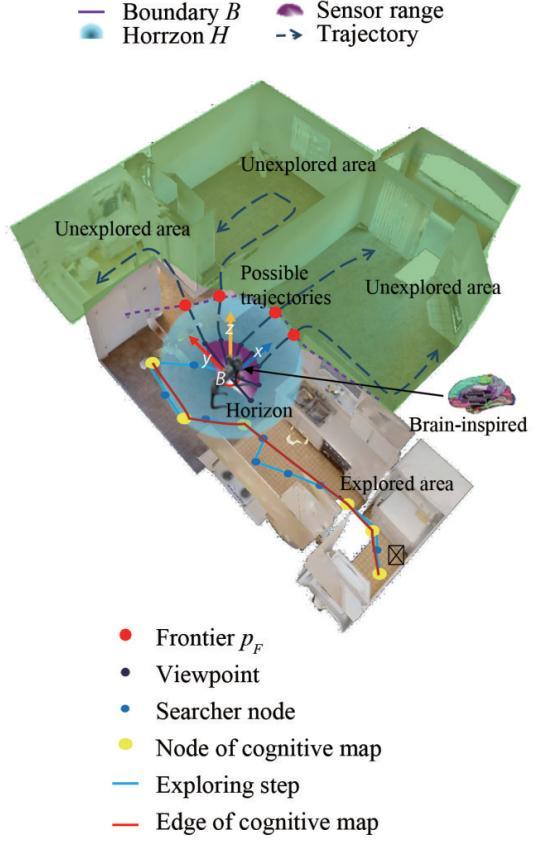
針對這一挑戰,上海交通大學上海市北斗導航與位置服務重點實驗室裴凌團隊開展研究,提出了一種具備類腦幾何感知能力的BIG(brain-inspired geometry-awareness)框架,用於執行探索和導航2項自主任務。
該框架巧妙融合了大腦中幾何感知細胞的神經模型,通過幾何分配器實時識別空間的擴展前沿點,並結合邊界信息等相關因素,從而高效搜索未探索區域。此外,BIG框架能夠充分利用探索階段獲得的環境信息,在導航任務執行過程中迅速定位目標位置,並自主構建環境的經驗地圖。實驗評估表明,BIG框架在節點數量、路徑長度、算法執行時間以及探索空間大小等多個指標上,相比於國際領先水平均表現出顯著的性能提升。
該研究成果,首次實現了基於幾何感知細胞的生物啓發式具身導航與探索架構,爲腦神經科學應用在未知空間的長程導航提供了理論和實驗支撐,未來將在智能機器人、自動駕駛、虛擬現實等前沿領域持續發揮重要作用。
友情鏈接
中國科協官方公衆平臺。傳播科協聲音,凝聚價值共識,弘揚創新文化,展示科協形象。