過去幾年間,AI 主要停留在屏幕內,用於文字對話、內容生成或自動化腳本執行;但近日,隨着 OpenClaw 生態的爆發式增長,兩個依託於此的開源項目讓智能體與物理世界之間的壁壘開始消融,這則振奮人心的消息,迅速點燃了全球機器人與 AI 社區的熱情。
2 月 23 日,在美國舊金山舉辦的 SF OpenClaw Hackathon 上,一個名爲 ROSClaw 的項目拿到了冠軍。Irvin 團隊搭建了一個橋接層,把當下最火的開源 AI Agent 平臺 OpenClaw 直接連到了真實的機器人硬件上。奪冠之後,團隊隨即宣佈將其開源。

(來源:X@irvinxyz)
具體來看,他們通過智能插件層將 OpenClaw 連接到機器人操作系統(ROS 2),藉助網頁實時通信技術(WebRTC)低延遲、安全連接的特性,實現了在全球任意地點遠程連接並控制 ROS 兼容機器人。AI 代理可通過攝像頭和傳感器讀取信息,並在真實世界中驅動機器人抓取與移動物體。
OpenClaw 本身是一款開源的自主 AI Agent 平臺,允許開發者在本地運行、連接各種語言模型,實現自動化任務、消息應用集成等功能。它在發佈後的短時間內便吸引了大量關注,在 GitHub 上獲得超過二十萬星標。
ROSClaw 的出現則補齊了 OpenClaw 在具身智能方向的關鍵一環,使其不僅可在數字空間執行自動化任務,還能通過智能硬件真正感知與操作物理環境。
Irvin 在帖子中直言:“代理逃出屏幕了!”團隊在 GitHub 倉庫中也明確描述:你在 Telegram、WhatsApp、Discord 或 Slack 上發一條消息,機器人就會行動起來。
與此同時,由 Menlo Research 社區推動的 Asimov 項目宣佈:其研發的人形機器人 Asimov v1 即將開源完整身體設計圖、仿真文件,以及執行器清單和可自由修改的零件列表。項目發佈者表示,這個開放設計提供了“完整搭建、修改和訓練自己人形機器人的所有必要資源”。
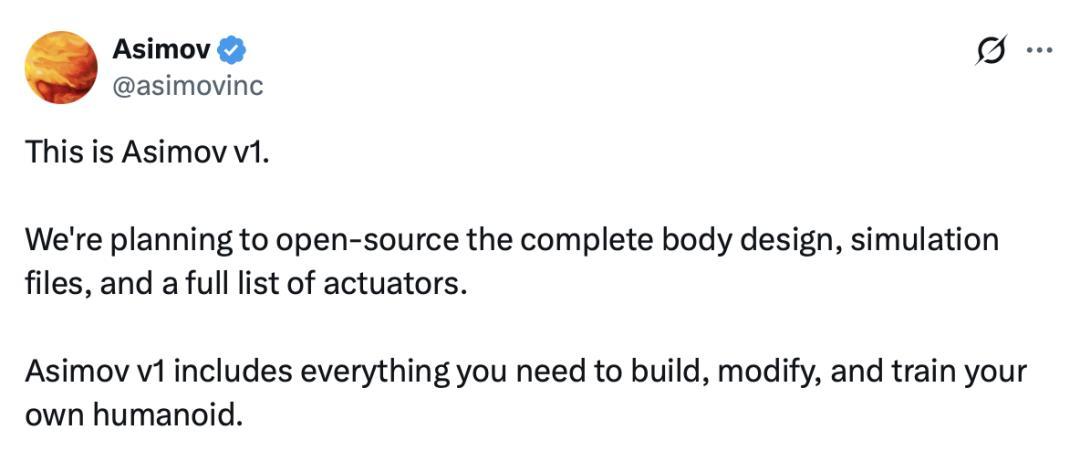
(來源:X@asimovinc)
知名機器人專家克里斯·帕克斯頓(Chris Paxton)隨即回覆:“這看起來太棒了!”同期,Asimov 還開放了腿部參考設計倉庫 asimov-v0,並明確表示全身體設計即將跟進。
隨後,Asimov 賬號又直接發帖宣告:“你的 OpenClaw 代理可以擁有實體了。”帖子明確指出:你可以在該平臺上爲你的 AI 代理賦予機器人身體……Asimov 和 Menlo Research 都將參與其中。這直接將 Asimov 硬件與 OpenClaw 代理生態對接,形成閉環。
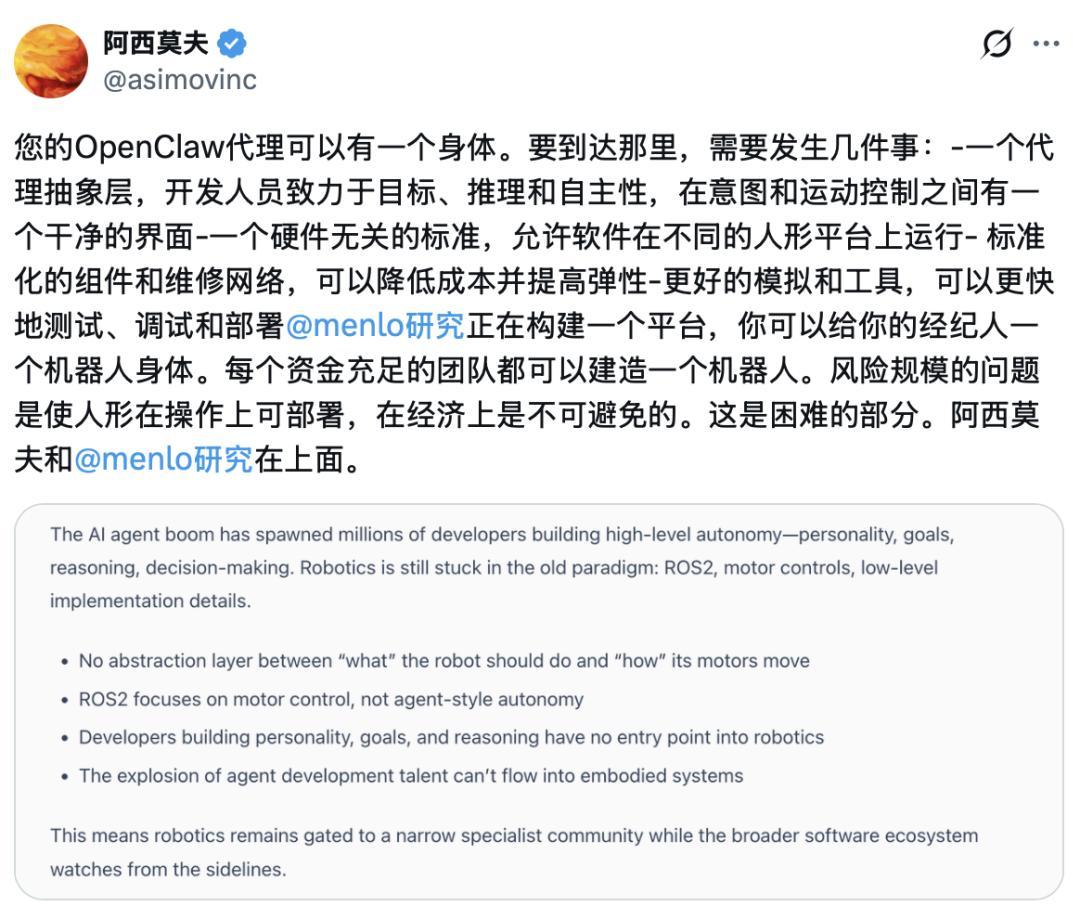
(來源:X@asimovinc)
在 Asimov 發佈的連接帖中,團隊系統闡述了實現目標所需的關鍵要素:
首先是一個代理抽象層:開發者可通過該層在目標、推理和自主性之間建立清晰接口,實現意圖與運動控制的交互;其次是一種與硬件無關的通用標準:允許軟件在不同人形機器人平臺運行;
要想讓這套系統變得更易用,還需要標準化組件和維修網絡,以及更完善的仿真和工具,以此降低成本、提高韌性,同時高效完成前期測試、調試和部署等準備工作。
模塊化、低成本、可復現的開源生態
Asimov 機器人的命名靈感來源於科幻小說作家艾薩克·阿西莫夫(Isaac Asimov),他在諸多作品中將機器人設想爲人類的助手:如果精心設計,就可以爲人類服務的機器。並提出了機器人三大定律,至今在現實世界中仍是機器人的基礎行爲準則框架:
機器人可能不會傷害人類,或者由於無所作爲而使人類受到傷害。
機器人必須服從人類的命令,除非這些命令與第一定律相沖突。
機器人必須保護自己的存在,只要這種保護不與第一或第二定律相沖突。
Menlo Research 表示:我們以這種精神命名我們的參考人形機器人:一個增強人類能力而不是取代人類能力的機器人,它從頭開始就具有安全性、可靠性和目的性。
根據 Menlo Research 官網和官方博客,Asimov 是一套完整的開源人形生態系統,由阿西莫夫操作系統(Asimov OS)、Asimov 人形機器人蔘考設計和開放供應鏈三大互連組件構成。
其中,Asimov OS 是一套運行在人形機器人上的操作系統,提供代理抽象層。代理用標準框架表達意圖,操作系統負責處理電機、傳感器、安全與遙測,不再依賴傳統低級電機控制。Asimov 人形機器人蔘考設計將開源硬件藍圖,支持模塊化組裝,腿部、軀幹、臂部、頭部可獨立開發並快速拼接。開放供應鏈將提供無門檻的組件製造商網絡,目標是將人形機器人年化總擁有成本降至約 3 萬美元。
博客披露,利用這套系統,僅需 100 天、研發支出不到 3 萬美元(含機庫、工具和零件更換),即可從零構建完整的人形腿部,實現行走能力。
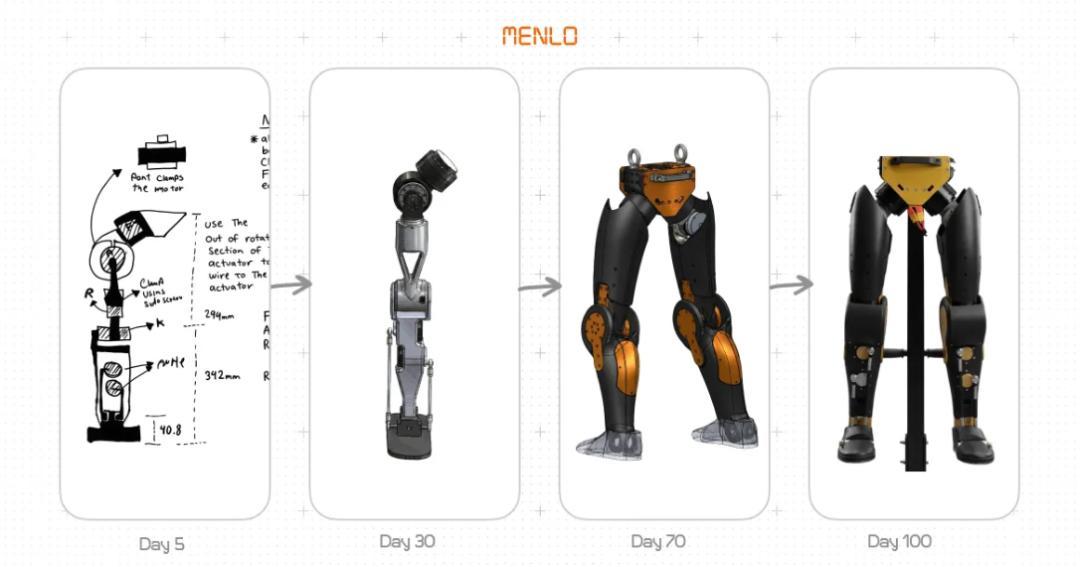
(來源:Menlo Blog)
此外,模塊化設計讓不同實驗室得以專注於子系統構建,在全球任何地方均可低成本復現。理想情況下,Asimov v1 的每條腿擁有 6 個自由度,全身體自由度約爲 26,最小高度 1.2 米,整機重量預計低於 40kg,低量產製造成本低於 2 萬美元。
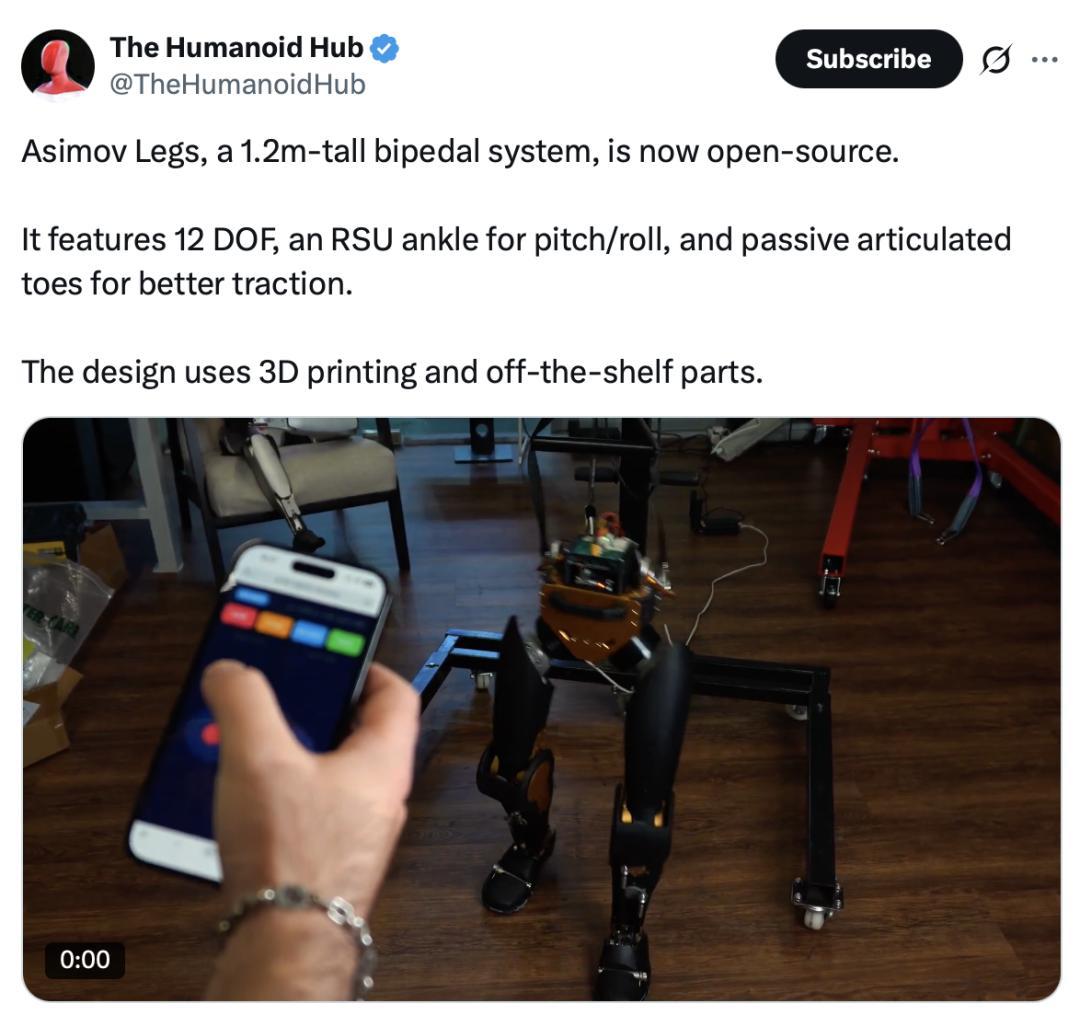
(來源:X@TheHumanoidHub)
對於 Asimov 而言,前文提及的 ROSClaw 直接補齊了軟件側。二者結合後,開發者可直接在 Menlo Stack 中完成從代理(代理開發者在標準框架中構建代理,該代理是自治有效載荷)、技能(代理通過現實世界的數據學習運動技能,例如洗碗、跳舞、物體操縱)、仿真(代理在數字孿生環境中運行,在物理部署前驗證行爲)到部署(通過單個配置步驟將代理賦予機器人實體)、遙測(實時反饋讓代理能夠快速迭代優化)的閉環迭代。
從“大廠專屬”到“人人可造”
以往,人形機器人研發門檻極高,只有資金雄厚的團隊才能觸及。而 Asimov v1 + ROSClaw 的開源組合,直接把“造機器人”的門檻拉低到“大衆消費”水平:僅需下載 GitHub 文件、根據物料清單採購零件、用 3D 打印或數控機牀加工,即可組裝、修改、訓練屬於自己的具身 AI。
(來源:X@asimovinc)
值得一提的是,Menlo Research 的明確目標是打造增強人類能力的勞動力平臺。從起步階段,Asimov 機器人就以“公開構建”的方式推進,目前已開源了其雙腿模塊設計和仿真文件,並在 Discord 社區中持續更新進展。
開發者還可以通過公開倉庫和交流渠道分享關節設計、控制架構和訓練策略,預計今年年內,這個項目就可以在“羣策羣力”之下搭建出完整機身框架。
在機器人研究領域,具身智能一直被認爲是當下 AI 發展的重要方向:只有當 AI 能夠在現實世界感知、行動,並與環境動態互動時,其判斷與行動能力才趨於成熟。ROSClaw 和 Asimov 項目的聯合出現,無疑代表了這一體系化構建的雛形:硬件開源提供身體,平臺提供標準化接口,橋接工具讓代理真正上身。
值得注意的是,這些開源動態仍處於早期範式探索階段。ROSClaw 雖然爲 OpenClaw 帶來了物理世界的訪問能力,但其穩定性、可擴展應用和真實物理任務執行能力仍有待考驗;OpenClaw 在社區中也有不少關於安全性、易用性和經濟性方面的討論和批評。而 Asimov 的人形機器人設計同樣面對硬件製造、仿真與現實間的“模擬到現實”(sim-to-real)差異等深層挑戰。
當數字智能開始反向接入物理世界,這一趨勢將可能重塑未來機器人、自主系統與人類社會協作的邊界。開發者們,準備好爲你的 AI 代理“造一副身體”了嗎?
參考資料:
https://x.com/asimovinc/status/2027564343639085239
https://x.com/irvinxyz/status/2025784961773846548
https://x.com/asimovinc/status/2028311401090154808
https://menlo.ai/products/asimov
https://menlo.ai/blog/humanoid-legs-100-days
https://github.com/asimovinc/asimov-v0
https://github.com/PlaiPin/rosclaw
運營/排版:何晨龍